分析 <<
Previous Next >> 範例
三角形表示式
PLAP:
The PLAP function through the known two points(A, B), one distance(L0) and one angle(α) to obtain the third point.
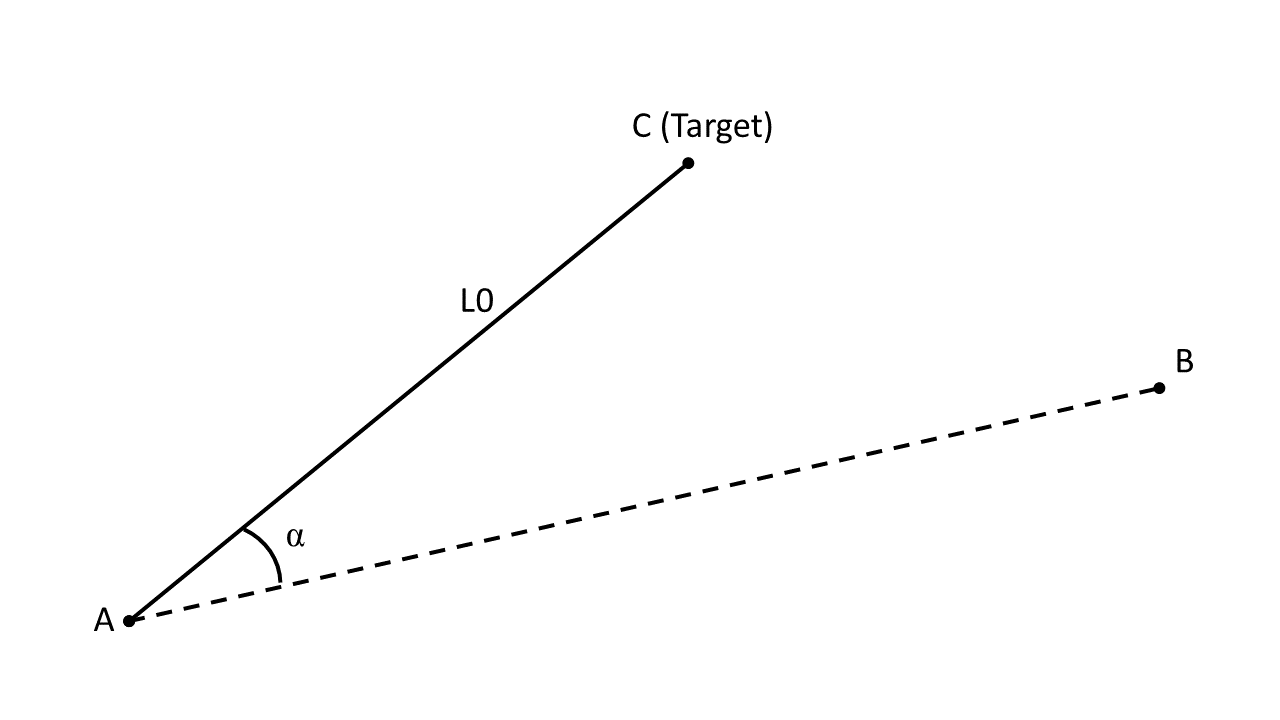
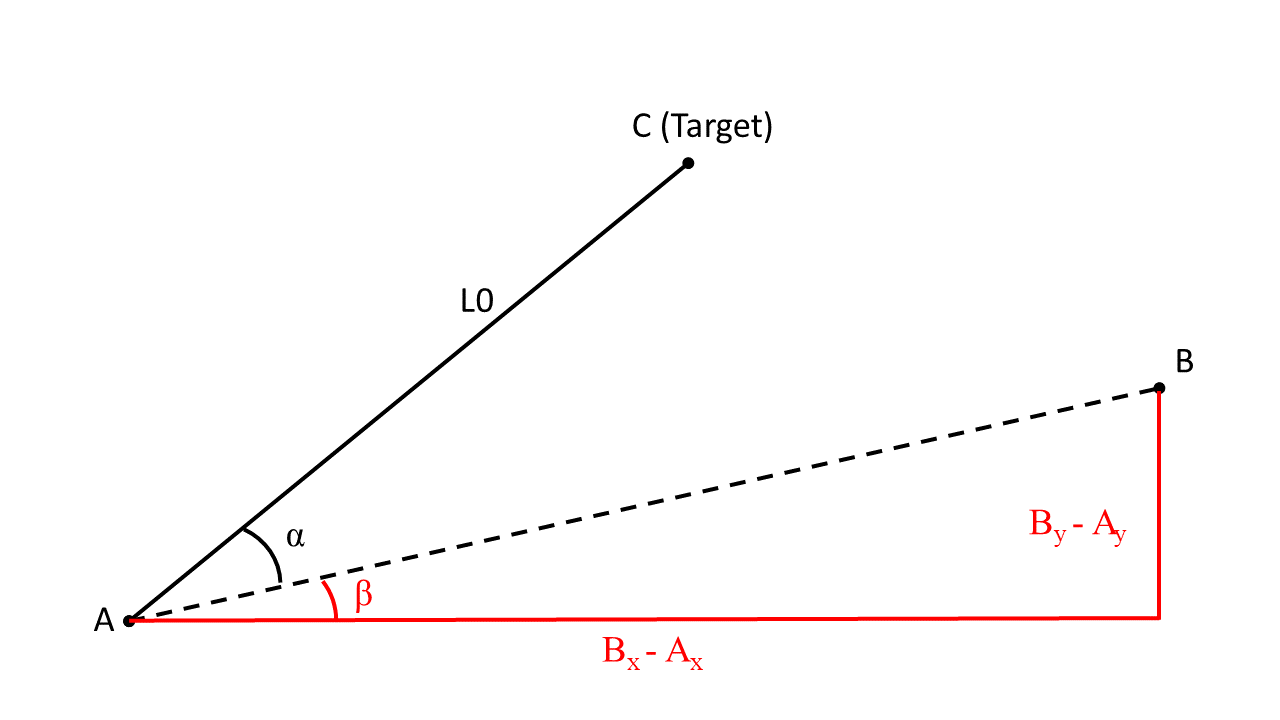
First, use the x and y components of coordinate point and inverse trigonometric function to find out β.
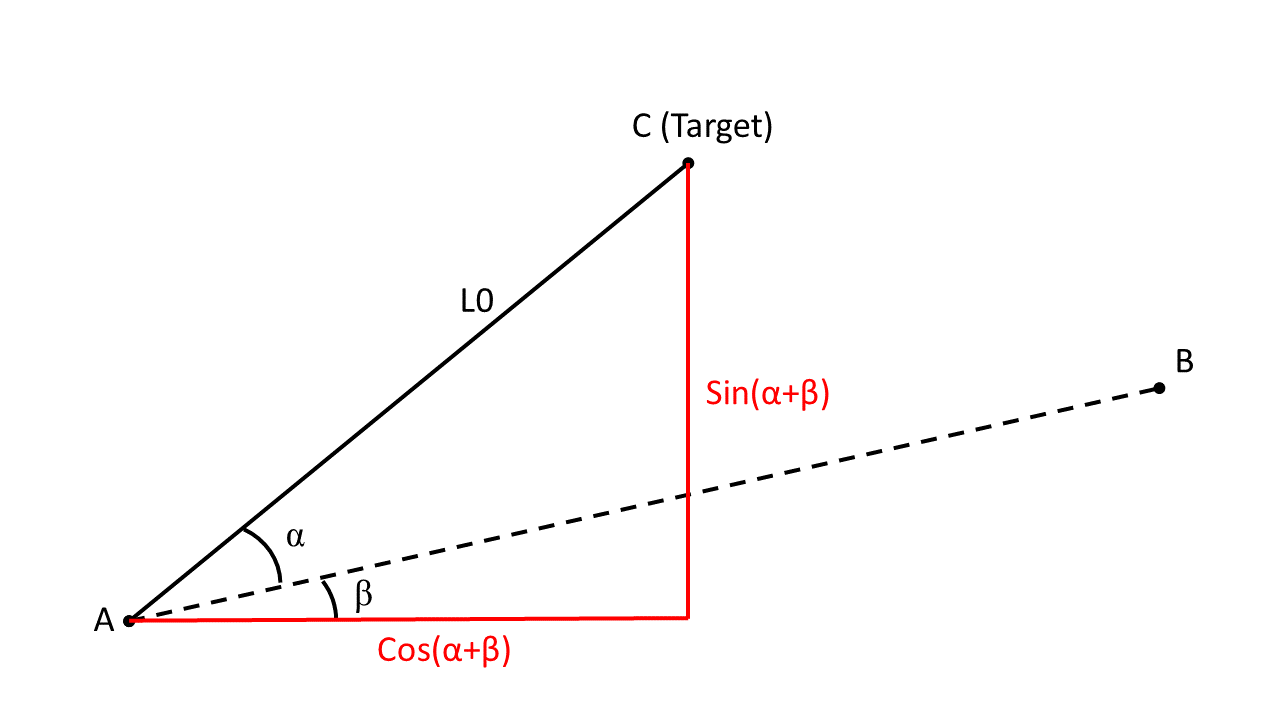
Then we can use the known angle α and the obtained angle β to find out the target point C coordinate.
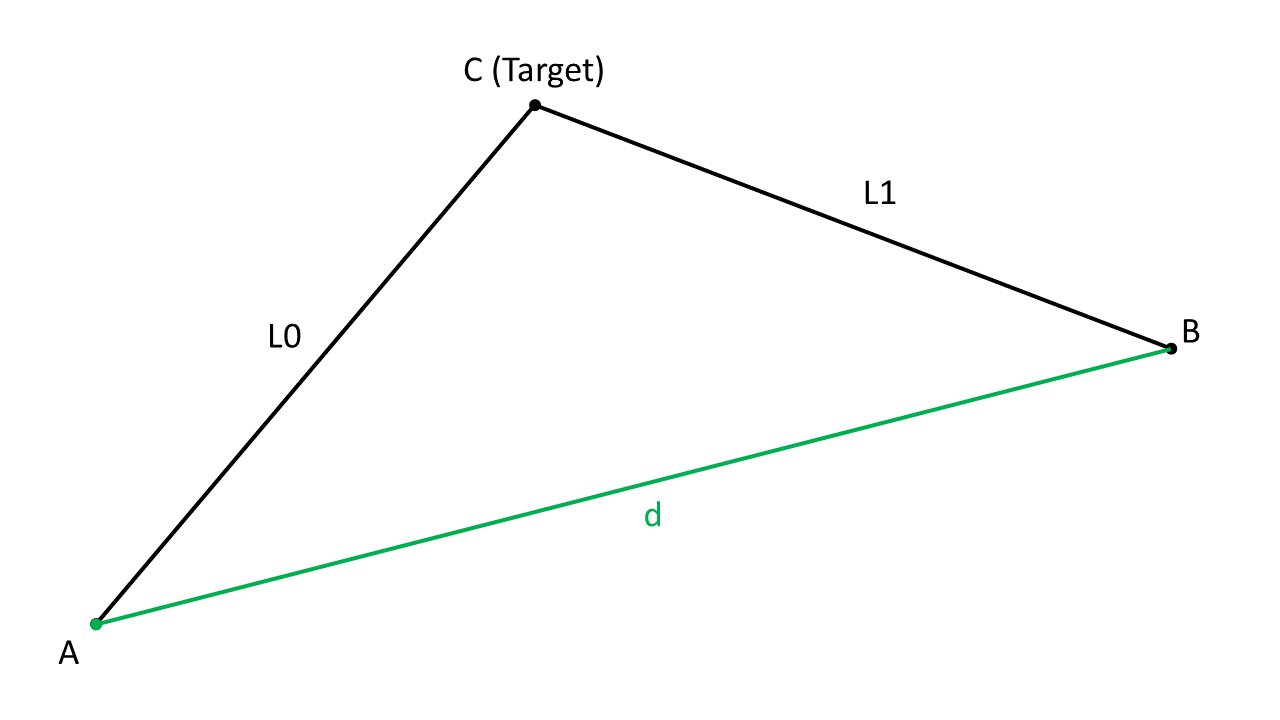
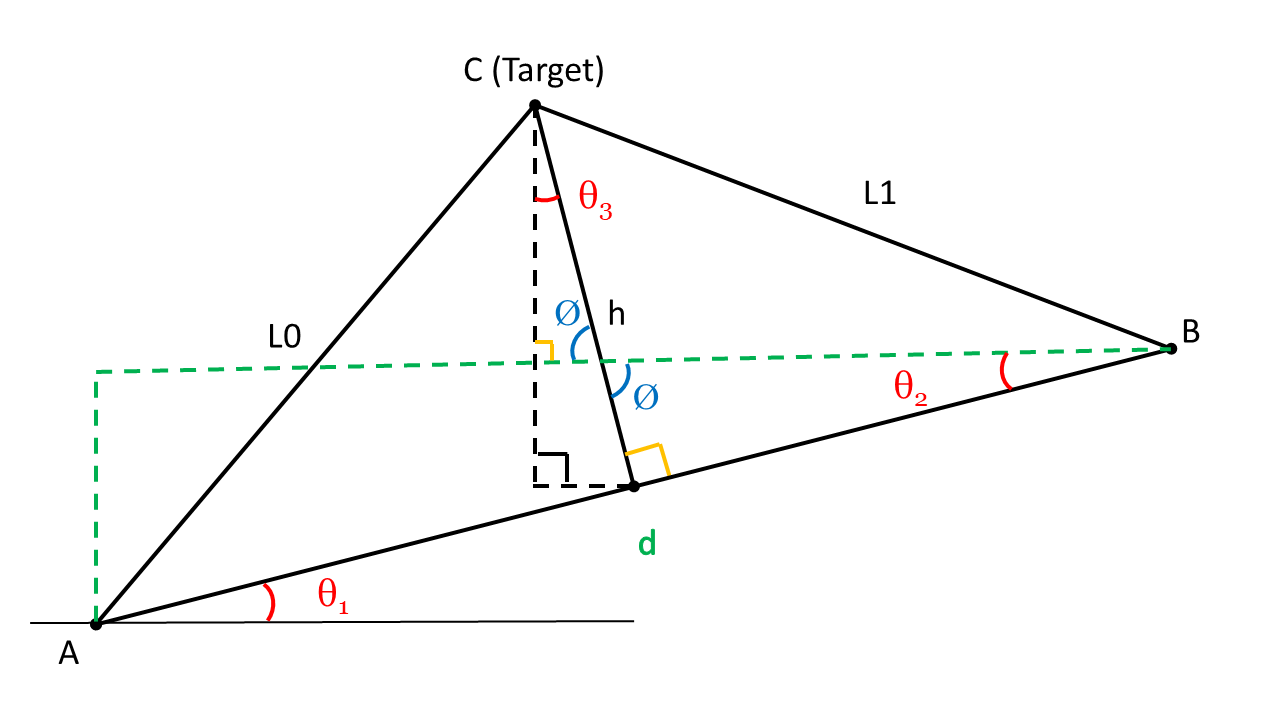
PLLP:
The PLLP function through the known two points(A, B) and two distances(L0, L1) to obtain the position of third point.
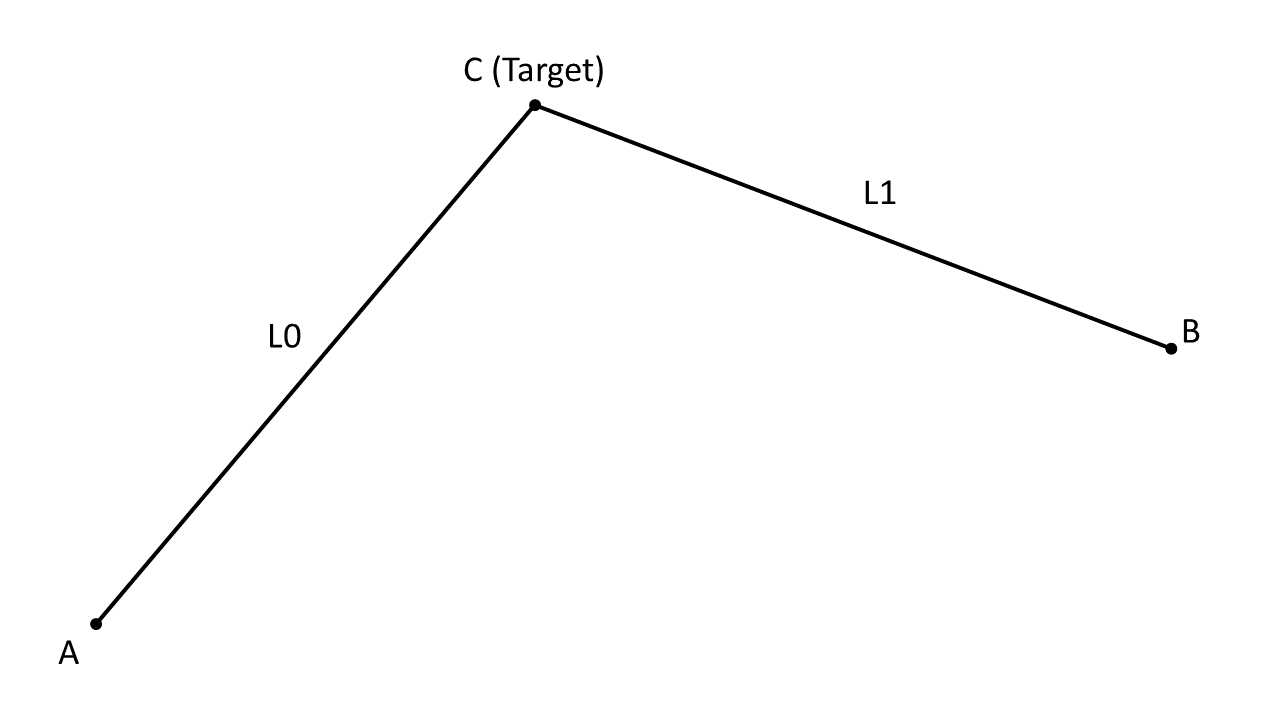
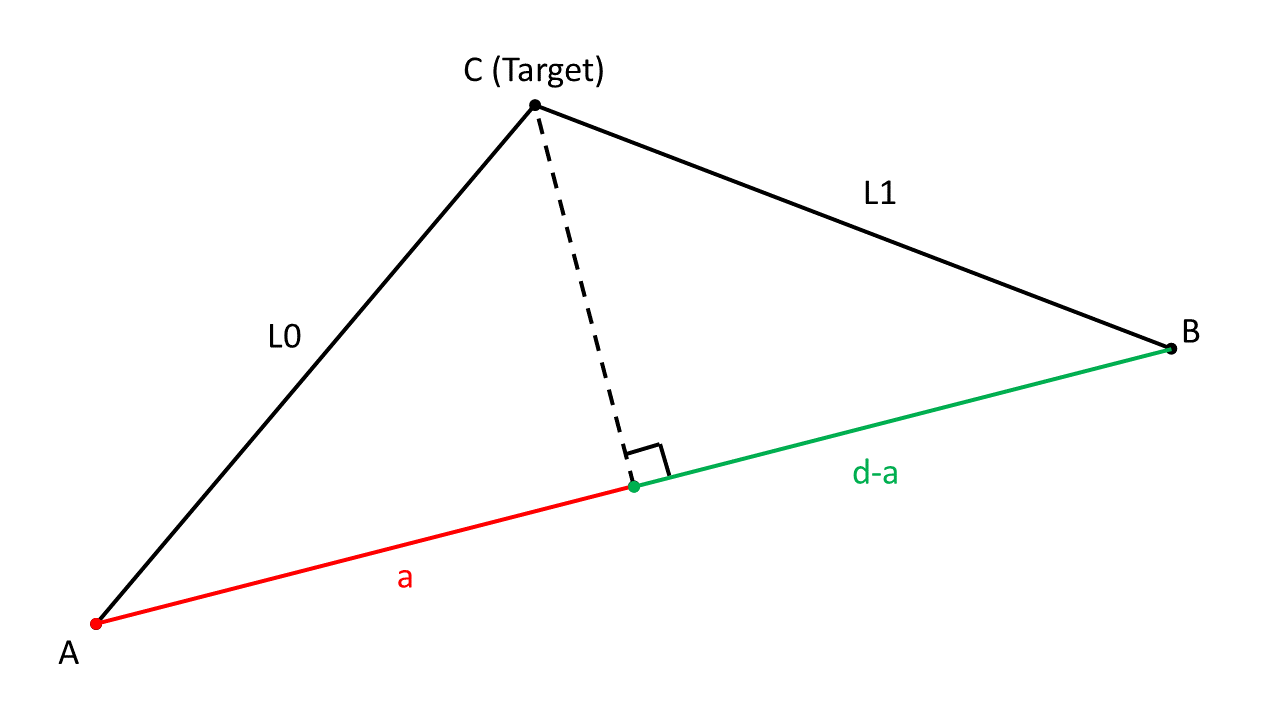
First, use Pythagorean theorem to find out the length d.
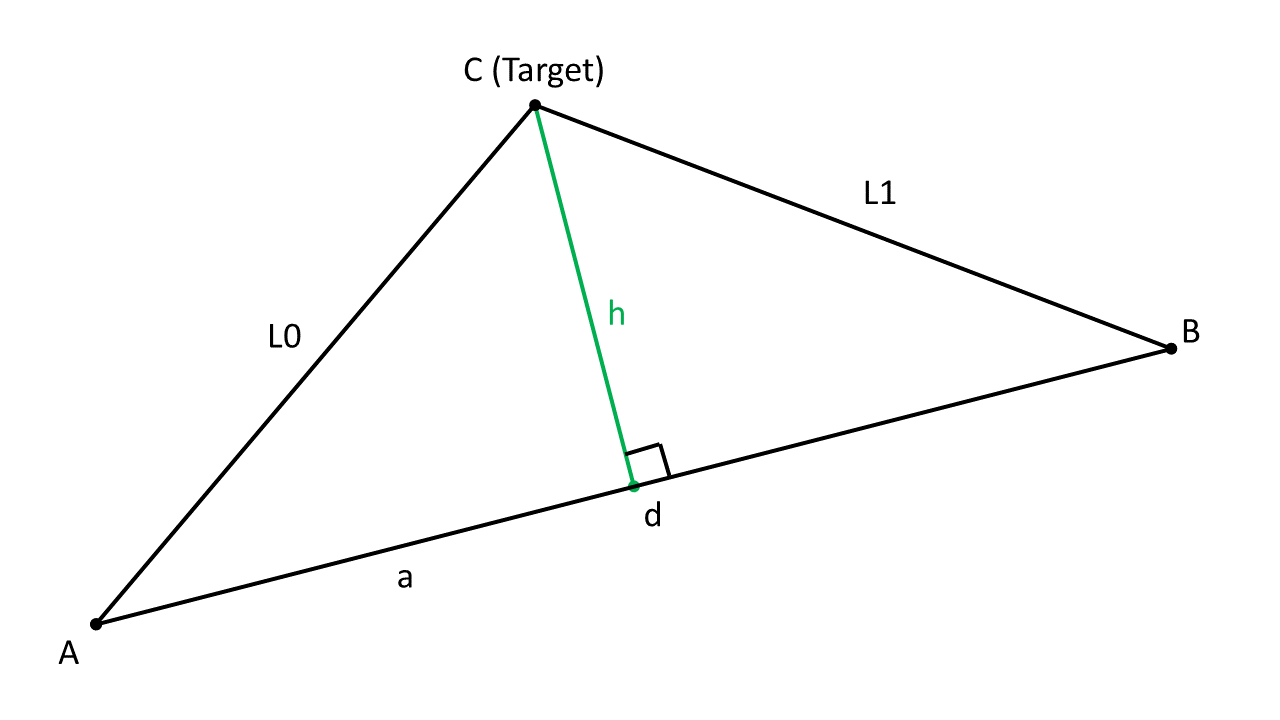
Draw a line perpendicular to line AB and connect to the intersection of L0 and L1. Then we can get two lines, line a and line (d-a).
According to Pythagorean theorem that can find out the line h.
Use inverse trigonometric function to find out θ1.
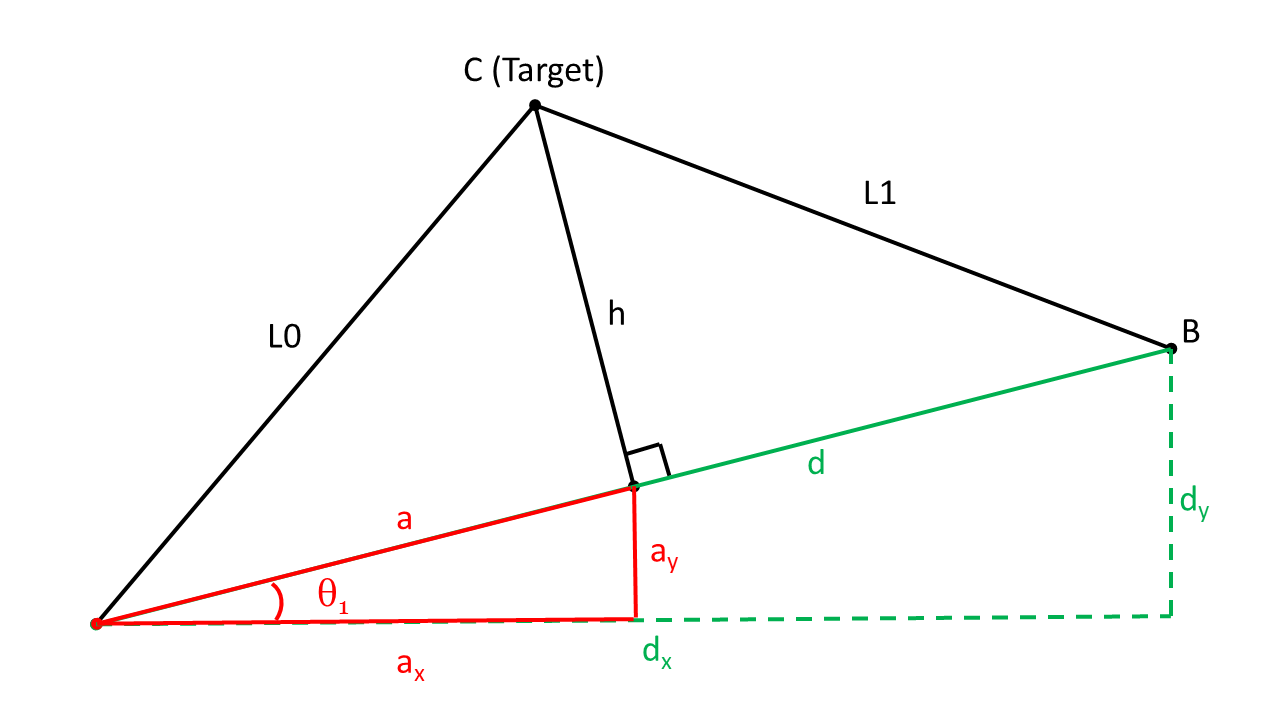
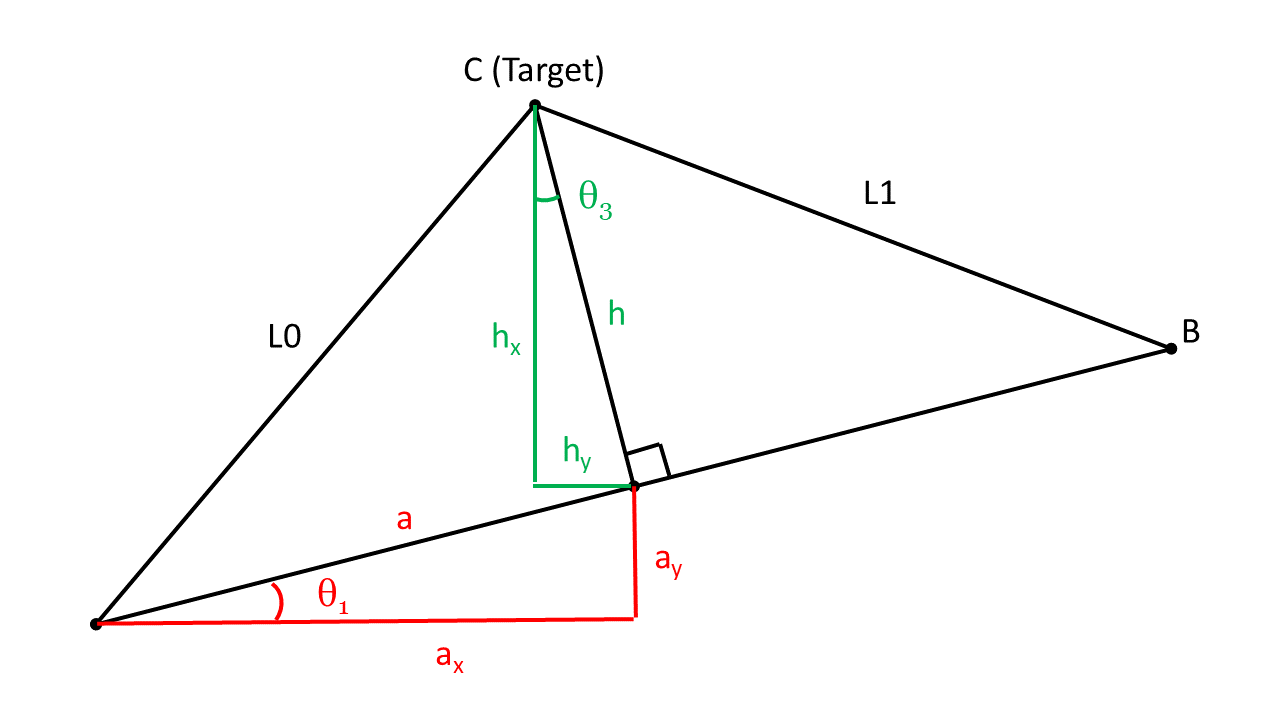
Due to alternate-interior angle, θ1 = θ2. Also, it has the similar triangles. As the result, we get θ2 = θ3.
Ultimately, we get target point C(Cx , Cy).
- Cx = ax - hy
- Cy = ay + hx
If the mechanism is inverse:
- Cx = ax + hy
- Cy = ay - hx
分析 <<
Previous Next >> 範例